

【畅学技术】带您快速了解SINAMICS S200新固件V6.4的新功能
- 北京焱赞科技有限公司
- 2025-01-08
01 概述
SINAMICS S200 、SIMOTICS S-1FL2 与 Motion Connect 350/380 相结合,作为新型单轴 AC/AC 伺服驱动系统,增强了伺服驱动产品的竞争力并扩大了西门子在标准伺服市场的产品组合覆盖范围。
西门子第三代伺服驱动系统SINAMICS S200 在自动化领域中得到了广泛的应用,随着客户需求的不断增加以及产品功能的不断完善,最近推出了新固件V6.4。
更新的固件除了增加了一些新功能,例如,位置跟踪/虚拟多圈、扩展附加报文、低频振动抑制(基础版)等,在使用方面也做了优化,例如,一键优化(OBT)的加强、SD卡reset功能升级、BOP新模式等。同时在调试软件中对主动回零时复用反向凸轮与硬件限位开关的设置做了更新。对于S200 PTI增加了诸如新增混合控制模式P/S与 P/T、强制使能等新功能。本文为大家逐一做个简单的介绍。
02 S200 PN新固件V6.4的更新信息
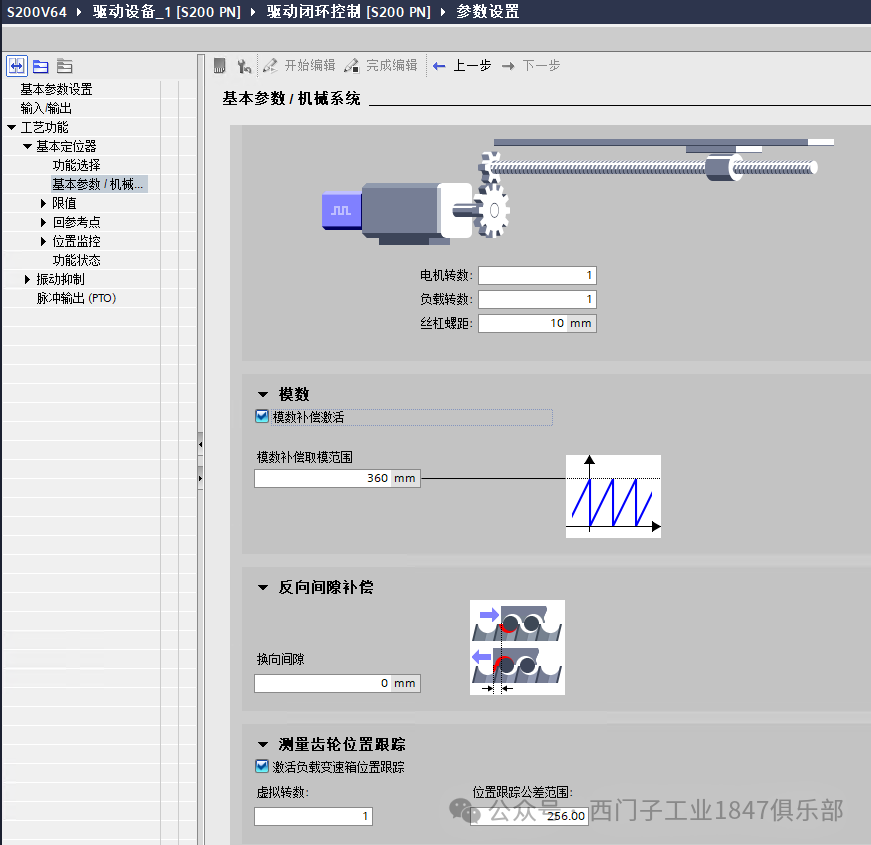
2.1 负载变速箱位置跟踪
实现的功能:
为单圈绝对值编码器设置虚拟多圈
扩大位置范围
当使用齿轮箱时,负载位置可以正确显示。
相关参数:
通过p2720激活位置跟踪
虚拟多圈由 p2721 设置
用于上电时位置监控的公差窗口由 p2722 设置
负载齿轮箱由 p2504 和 p2505 设置
通过r2723显示
图2-1
2.2 报文拓展
实现的功能:
通过Startdrive添加到主报文中。
增加报文700
增加自由报文(≤6个字)
报文700和自由报文可以同时配置
客户受益:
符合 “SW adaption” 概念,为区域业务部门提供更多的可能性,以满足他们的定制化需求。
节省客户的系统成本,即减少PLC使用的IO。
目前版本只支持驱动→PLC的报文传输
注意:扩展报文的第一个报文PZD必须配置为“数字输入状态”,其他PZD可以从下拉列表中自由配置。
图2-2
2.3 低频振动抑制
低频振动抑制功能为位置设定值配置滤波器。它可以抑制频率为 0.5 Hz 至 62.5 Hz 之间的机械振动。该功能在 EPOS 控制模式下有效。
客户受益:
帮助客户抑制机械振动。
免费。
使用条件:
EPOS已启用。
振动抑制功能已激活。
固有频率在p31585中设置,最小10Hz。
确定固有频率:
根据经验确定频率。
频域中的测量功能。
在时域中使用机械运动来确定。
2.4 新增报文 113 和 700
1. 报文113
支持EPOS直接设定点输入(MDI),包括物理和LU单位、倍率、位置实际值和速度实际值。
支持64位浮点数。
2. 报文700
将安全集成功能的状态传送到更高级别的控制器,独立于PROFIsafe。可以与所有其他功能安全一起使用。例如STO状态。
在报文配置中,点击 “添加Safety Integrated补充报文” 。
图2-3
2.5 数字量反向输出功能
对于S200 PN,可以通过设置p748参数,使数字量输出反向。
图2-4
03 S200 PTI新固件V6.4的更新信息
3.1 复合P/S和P/T模式
在原有控制模式的基础上,新增了快速PTI/速度,快速PTI/扭矩控制模式。模式切换不再需要重启驱动。可通过p29003进行控制模式的设置。
图3-1
3.2 增加Modbus新寄存器
增加了两个新的寄存器,分别用于保存所有的参数和实际位置值。
图3-2
3.3 强制 Servo-on
通过p29320.0强制SON信号:
如果p29320.0=1,SON始终保持在高电平。
如果p29320.0=0,则SON默认分配给数字输入。
3.4 通过数字量输入控制 Servo-on
当通过数字量输入控制 Servo-on时,可设置p29006来进行Servo-on模式的选择:
如果p29006=0,Servo-on通过SON的上升沿。
如果p29006=1,Servo-on通过驱动上电过程中通过SON的高电平,并且上电后通过SON的上升沿
如果p29006=2,Servo-on通过SON的高电平。
3.5 超行程:新报警A52962和A52962
可以通过p29321将超行程信号(CWL/CCWL)更改为故障或报警:
p29321=0(默认设置):消息类型为故障F52961或F52960。
p29321=1:消息类型为报警A52963或A52962。
CWL/CCWL信号可以分配给数字输入端,也可以通过p29320.1和p29320.2进行设置。默认值为0。
客户受益:
满足客户的特殊要求,达到限位开关时显示报警信息而不产生故障信息。
3.6 DO警告功能扩展:p29340和p29341
通过设置参数p29340和p29341,可以把CWL及CCWL的报警通过数字量输出信号输出。
图3-3
04 使用上的优化
4.1 功能
1、OBT增强-p5301.7
在驱动一键优化时可以通过设置p5301.7=1激活同步轴。
图4-1
这个功能目标是保证多个轴的响应时间相同,通过p5275设置的每个轴的期望响应时间,OBT会根据这个总的期望想要时间,自动计算内部滤波器设置。
有效性:
对PN,这个功能只针对EPOS有效。
对PTI,这个功能对PTI模式有效。
2、通过SD卡更新BIOS
客户可以从SIOS下载BIOS并自行更新。BIOS更新以提高稳定性。
3、重置卡功能更新
使用SD卡重置驱动器,有以下两种方式。
使用RESET.TXT空文件
删除所有的用户自定义的驱动器设置。固件不变,手动重置到工厂初始状态后,可采用HTTPS协议通过服务端口X127或PROINET接口X150访问Web网络服务器。
使用RESET.TXT文件中包含文字 KEEP_COMM
删除所有的用户自定义的驱动器设置。固件不变,通信接口的设置保持不变。
4.2 BOP面板新模式
1、24V低时BOP显示“L24”
2、驱动上电时显示优化
“- - - - - -” 表示启动进度,一旦所有的“-”符号被点亮,启动过程就完成了。
3、 UMAC A1637 显示的优化
当驱动未配置UMAC,就会触发A1637报警。
V6.4上电后,若UMAC未配置,A1637默认不显示,按“M”键切换监控模式和诊断模式后,可以显示。
05 调试软件中的更新
5.1 主动回零时复用反向凸轮和硬件限位开关
对于S200 PN主动回零,如果在主动回零时,复用反向凸轮与硬件限位开关,则可以按下面方法设置:
设置驱动的DI点功能为“负向反向凸轮”或“正向反向凸轮”。
图5-1
在位置限制画面中选择设置正、负硬件限位开关。
图5-2
5.2 EPOS控制机械减速比及模态轴的设置
当S200在EPOS控制模式下设置了机械减速比及模态轴,如果驱动器报F07442故障,可以采用设置虚拟多圈的方式来解决。
图5-3
06 调试工具下载
S200 V6.4的调试,请更新TIA Portal和SINAMICS Startdrive至下面的版本:
1. TIA Portal V20: SIMATIC STEP 7 incl. Safety, S7-PLCSIM and WinCC V20 TRIAL Download - ID: 109963850:
https://support.industry.siemens.com/cs/us/en/view/109963850
2. Startdrive V20: SINAMICS Startdrive V20 - ID: 109963692:
https://support.industry.siemens.com/cs/us/en/view/109963692
- 上一篇:没有了!
- 下一篇:北京焱赞科技有限公司:智能科技驱动,赋能多元产业革新





 网站首页
网站首页 解决方案
解决方案 新闻资讯
新闻资讯 一键拨打
一键拨打